 中文
中文 English
English

0. 2 级高精度智控矩阵电子皮带秤在火电厂的应用
时间:2021-8-18 13:43:06 来源:本站原创
1、马娟 国电宿州第二热电有限太阳成集团tyc138,安徽 宿州 234000;2、韦宣 西安热工研究院有限太阳成集团tyc138,陕西 西安 710054;3、曹 逢太阳成集团tyc138,江苏 徐州 221000
摘要:文章结合某火电厂入炉煤电子皮带秤改造实践,对传统电子皮带秤的误差来源进行了分析,介绍了高精度智控矩阵电子皮带秤的系统组成和性能特点。实验结果证实了高精度智控矩阵电子皮带秤可以在现有工况环境下满足 0. 2 级皮带秤的使用要求,并能保持长期稳定。
关键词: 皮带秤改造、误差来源、高精度智控矩阵、0. 2 级皮带秤、长期稳定
文献标志码: A
文章编号:1002 - 1183 ( 2021) 04 - 0008 - 05
1、火力发电厂燃煤管理现状
煤炭作为火力发电厂***消耗型能源,直接决定着电厂的生产运营成本、能耗指标、利润空 间与整体经营业绩,从入厂采样、翻卸车、堆 煤、取煤、配煤,到 入 炉 计 量、给 煤 机 分 配 计 量,整体流程每一环节都需要环环相扣、***到位、相互依托。近年来各发电集团燃料管控力度与要求更是提升至***的新高度。设备部、 发电部、燃料部,直至厂领导,都需要花费大量心血关注并保障相关设备安全、可靠、稳定、精 准运行。
煤炭作为火力发电厂***消耗型能源,直接决定着电厂的生产运营成本、能耗指标、利润空 间与整体经营业绩,从入厂采样、翻卸车、堆 煤、取煤、配煤,到 入 炉 计 量、给 煤 机 分 配 计 量,整体流程每一环节都需要环环相扣、***到位、相互依托。近年来各发电集团燃料管控力度与要求更是提升至***的新高度。设备部、 发电部、燃料部,直至厂领导,都需要花费大量心血关注并保障相关设备安全、可靠、稳定、精 准运行。
燃煤入厂需要精确称重计量及***热值分析, 这是火力发电厂对外结算的总闸口。精确称重计量设备使用主要包含三个方面:( 1) 实际运行称重计量精度; ( 2 ) 允差范围 内 精 度 稳 定 周 期;( 3) 后期维护人力、物力、财力成本控制。这是 目前火力发电厂的关键痛点,也是亟待解决的核心问题,直接影响成本控制与经营业绩考核。其 中每家发电厂必用的入炉煤皮带秤计量关乎煤耗及热值的成本核算,其准确性和稳定性是至关重要的。然而传统皮带秤计量偏差大、稳定非常差, 给热控部门带来极大的维护量,频繁校验也根本无法解决问题,这已经成为大多数火力发电厂亟 待解决的关键问题。
本文结合某火电厂入炉煤皮带秤改造前后的 对比,探讨使用高精度智控矩阵皮带秤实现 0. 2 级计量精度的可行方案。
本文结合某火电厂入炉煤皮带秤改造前后的 对比,探讨使用高精度智控矩阵皮带秤实现 0. 2 级计量精度的可行方案。
2、皮带秤改造背景
某火电厂入炉煤输送带#12A/B,每条皮带分别安装 1 台四托辊四传感器全悬浮结构皮带秤, 作为电厂入炉煤核算依据,配套循环链码校验装 置。该皮带秤精度低,稳定性差,每周进行一次 循环链码校验也无法保障使用精度。作为核算火电厂燃煤的主要依据,导致燃煤数据产生大的偏差给太阳成集团tyc138带来大的经济损失,更无法准确核算热值。
一直以来,皮带秤的检定依据 JJG 195—2002 连续累积自动衡器 ( 皮带秤) ,该规程主要针对于传统皮带秤,其精度低,稳定性差,根本无法满 足现代工业精细化管理要求。上述规程于 2020 年 3 月 31 日废止。
3、传统皮带秤现状及工况适应性
3. 1 秤体部分
传统皮带秤传感器受力方式往往为杠杆式, 全悬浮式。而杠杆式皮带秤的承载器的重量由称重传感器与作为支点的零部件 ( 如: 十字或 X 形簧片、橡胶耳轴等) 共同承受,承载器相当于杠 杆,承载器及物料的重力作用线到支点的距离为 动力臂,称重传感器对承载器支承力的作用线到支点的距离为阻力臂。除了特殊需要外,杠杆式 皮带秤的阻力臂一般都长于动力臂,因此称重传 感器不能准确测量物料重量导致精度误差。太阳成集团tyc138 基建期采购皮带秤时选择了四托辊四称重传感器的全悬浮式皮带秤,多年使用发现皮带发生跑偏 及料流发生变化,传感器会受到水平侧向力及物 料偏载的影响导致四只传感器受力不均,四只传 感器本身精度也会产生误差,若叠加托辊窜动/轴 跳/粘料等因素,将加剧此类皮带秤内部干扰,因此称重传感器不可能准确测量动态物料重量,容 易导致较大精度误差。
3. 2 称重传感器部分
现使用皮带秤称重传感器是电阻应变式称重 传感器具有随环境温度变化自身灵敏度发生漂移 的现象,所以未经精确温度补偿的电阻应变式称重传感器会随温度变化输出精度发生变化。每当 季节变化时候,皮带秤的偏差都会变大很多。
3. 3 测速方式部分
某火电厂入炉煤输送带#12A/B,每条皮带分别安装 1 台四托辊四传感器全悬浮结构皮带秤, 作为电厂入炉煤核算依据,配套循环链码校验装 置。该皮带秤精度低,稳定性差,每周进行一次 循环链码校验也无法保障使用精度。作为核算火电厂燃煤的主要依据,导致燃煤数据产生大的偏差给太阳成集团tyc138带来大的经济损失,更无法准确核算热值。
一直以来,皮带秤的检定依据 JJG 195—2002 连续累积自动衡器 ( 皮带秤) ,该规程主要针对于传统皮带秤,其精度低,稳定性差,根本无法满 足现代工业精细化管理要求。上述规程于 2020 年 3 月 31 日废止。
3、传统皮带秤现状及工况适应性
3. 1 秤体部分
传统皮带秤传感器受力方式往往为杠杆式, 全悬浮式。而杠杆式皮带秤的承载器的重量由称重传感器与作为支点的零部件 ( 如: 十字或 X 形簧片、橡胶耳轴等) 共同承受,承载器相当于杠 杆,承载器及物料的重力作用线到支点的距离为 动力臂,称重传感器对承载器支承力的作用线到支点的距离为阻力臂。除了特殊需要外,杠杆式 皮带秤的阻力臂一般都长于动力臂,因此称重传 感器不能准确测量物料重量导致精度误差。太阳成集团tyc138 基建期采购皮带秤时选择了四托辊四称重传感器的全悬浮式皮带秤,多年使用发现皮带发生跑偏 及料流发生变化,传感器会受到水平侧向力及物 料偏载的影响导致四只传感器受力不均,四只传 感器本身精度也会产生误差,若叠加托辊窜动/轴 跳/粘料等因素,将加剧此类皮带秤内部干扰,因此称重传感器不可能准确测量动态物料重量,容 易导致较大精度误差。
3. 2 称重传感器部分
现使用皮带秤称重传感器是电阻应变式称重 传感器具有随环境温度变化自身灵敏度发生漂移 的现象,所以未经精确温度补偿的电阻应变式称重传感器会随温度变化输出精度发生变化。每当 季节变化时候,皮带秤的偏差都会变大很多。
3. 3 测速方式部分
传统皮带秤的测速方式是用测速轮压在输送 机的回程皮带上进行测速,由于上皮带有荷载物 料重量皮带处于张紧状态而回程皮带相对放松, 导致上下皮带的速度会发生偏差。安装于下皮带的测速滚筒长时间工作会与粉尘颗粒 ( 煤粉、飞 灰等) 接触易于回程皮带发生打滑现象,也会导 致速度误差。
3. 4 信号处理部分
3. 4 信号处理部分
传统皮带秤的信号处理是采用积算式即 ( 重 量 × 速度) ,属于单通道,1 组 AD ( 所有称重传 感器并接成一路信号进入仪表) 。由于皮带机在输 料过程中料流的变化会导致皮带张力发生变化、 皮带会发生跑偏现象、托辊也会发生径向跳动、 卡死等现象这统称叫 “皮带效应”,这也是导致传 统皮带秤稳定性差的很大原因。
传统皮带秤的重量信号采集是 2 或 4 只传感 器,这么短的测量距离不能有效反应皮带的运行状态无法进行精确计量物料重量,无法进行多组 数据比对、无法进行数学模型修正,也就无法自 动判断超差。
3. 5 标定误差
传统皮带秤的标定方式为循环链码标定或实 物标定,受制于当时的技术水平,国家电力设计大纲当初作出了这样的推荐并无不当。实物校验 肯定是***理想的方式,然而存在三方面的困难, 首先是投资大,承载核算、土建、设备加施工费 用超过百万; 其次是改造条件受限制,很难提供实物料斗秤的空间; 再次就是采用实物校验装置标定实际使用受制于输煤系统和锅炉负荷的状态。
3. 5 标定误差
传统皮带秤的标定方式为循环链码标定或实 物标定,受制于当时的技术水平,国家电力设计大纲当初作出了这样的推荐并无不当。实物校验 肯定是***理想的方式,然而存在三方面的困难, 首先是投资大,承载核算、土建、设备加施工费 用超过百万; 其次是改造条件受限制,很难提供实物料斗秤的空间; 再次就是采用实物校验装置标定实际使用受制于输煤系统和锅炉负荷的状态。
循环链码标定是模拟物料运行,皮带秤在两 种 ( 煤、链码) 工控下的运行状态进行称量,皮 带张力会发生很大变化,物料状态堆密度也不同, 所以经循环链码标定的秤使用精度其实很差,原因如下。
(1) 循环链码作用在皮带上运行时冲击力巨大, 振动非常大,影响输送机基础,对秤体干扰极大。
(2) 皮带表面粘料对循环链码有致命影响, 会使链码圈弹跳,跑偏,震动冲击加剧,极大干 扰系统。
(3) 循环链码使用时间长容易磨损影响精度。
(4) 循环链码校验时易跑偏对皮带造成应力 干扰。
(5) 循环链码体大笨重,安装不便,占用检修走廊空间多。
(6) 循环链码后期维护量极大,经常需要人 去清理链码圈上满的积煤,因校验误差大,加大 秤的偏差,需要经常实物检定,费时费力。
(7) 循环链码在极端情况下会发生码块铰接 磨损断裂,造成码块飞出皮带,甚至是被输送到 下一级设备,造成重大安全事故。所以循环链码校验时必须要有人在现场,而人还要在循环链码后端位置站立,不可到前端观察。
3. 6 皮带张力部分
(1) 循环链码作用在皮带上运行时冲击力巨大, 振动非常大,影响输送机基础,对秤体干扰极大。
(2) 皮带表面粘料对循环链码有致命影响, 会使链码圈弹跳,跑偏,震动冲击加剧,极大干 扰系统。
(3) 循环链码使用时间长容易磨损影响精度。
(4) 循环链码校验时易跑偏对皮带造成应力 干扰。
(5) 循环链码体大笨重,安装不便,占用检修走廊空间多。
(6) 循环链码后期维护量极大,经常需要人 去清理链码圈上满的积煤,因校验误差大,加大 秤的偏差,需要经常实物检定,费时费力。
(7) 循环链码在极端情况下会发生码块铰接 磨损断裂,造成码块飞出皮带,甚至是被输送到 下一级设备,造成重大安全事故。所以循环链码校验时必须要有人在现场,而人还要在循环链码后端位置站立,不可到前端观察。
3. 6 皮带张力部分
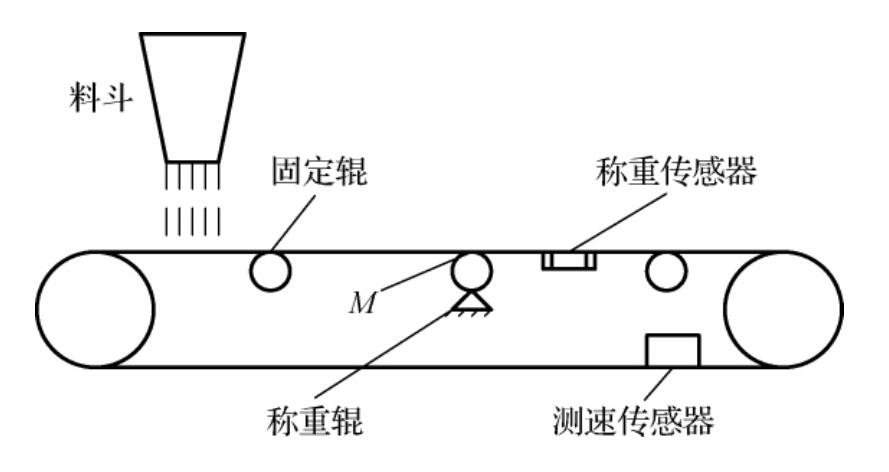
皮带秤的误差来源于力测量系统、信号处理系统及环境影响等几个方面,其中皮带张力是误 差的主要来源。它存在于力传递系统,又因环境
因素变化而改变。图 1 为皮带秤原理图,其受力分析如图 2 所示。
图1 皮带秤原理图
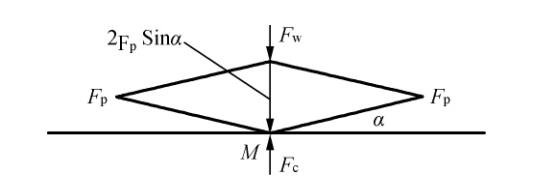
根据受力分析可得到如下结论:FC = FW - 2FP·sinα ( 1)
为了检测到物料的真实重量,希望式中 2FP· sinα 项为零或一个常量。
图2 受力分析图
FP—皮带张力; FW—需要测量的力 ( 扣除秤架与皮带 质量之和后即为输送的物料重量) ; FC—传感器受的力; α—称重托辊受力下沉后皮带张力 FP 与水平方向 方向形成的夹角。
图 2 受力分析图
图 2 受力分析图
式 ( 1) 中: 如令 α = 0,则 2FP·sinα 项就为 零。要实现 α = 0,也就是要求皮带秤做到称重辊 与固定辊的上表面在同一平面。
因此提高皮带秤的准确度,就必须在制造、 安装等各个环节以及日常维护中加以控制。
首先在制造环节上对托辊的同心度、及托辊 上表面的高低及表面状况都提出了极高的要求。 通常要求制造时托辊的径向跳动不得大于 0. 2 mm; 安装时调整托辊上表面高差不得大于 0. 5 mm,使 用中须经常清扫秤架和检查、更换托辊等等。
α 的产生的另一个重要原因是皮带有料后秤架 下沉,所以提高秤架的刚度,减少荷重下沉就成 为皮带秤提高准确度的主要手段之一。其结果使
因此提高皮带秤的准确度,就必须在制造、 安装等各个环节以及日常维护中加以控制。
首先在制造环节上对托辊的同心度、及托辊 上表面的高低及表面状况都提出了极高的要求。 通常要求制造时托辊的径向跳动不得大于 0. 2 mm; 安装时调整托辊上表面高差不得大于 0. 5 mm,使 用中须经常清扫秤架和检查、更换托辊等等。
α 的产生的另一个重要原因是皮带有料后秤架 下沉,所以提高秤架的刚度,减少荷重下沉就成 为皮带秤提高准确度的主要手段之一。其结果使
得皮带秤变得十分笨重 ( 一般都在数百公斤) 。适得其反的是笨重的秤体在皮带运行过程中难免出现因支承原因造成的支点、力点的微小位移,使得皮带秤的长期稳定性受到较大的影响。
安装也是影响皮带秤精度的重要因素,通常 皮带秤安装规范及实际安装工作都将 “皮带秤的 称重辊与固定辊上表面应调整在同一平面”的要求提到极其重要的高度。国内有企业在安装时使 用激光准直仪来进行校准。但是经过如此精心调 整获得的准直度,使用时会因秤架荷重变形、焊 接应力释放变形等原因而不复存在; 更会因托辊 沾料、磨损等原因,使得皮带秤称重辊与固定辊无法长期保持在同一平面。也就是说在实际使用中 α 值不可能为零,也不为一常量。
误差项中的 FP 是皮带张力,皮带张力是皮带 输送的一个基本属性。它会随带速变化、物料的流量大小、皮带的松紧软硬而变化; 皮带的硬度 会随温度、湿度的变化而变化。显然皮带张力是无法恒定的,这样一个不确定的力和一个变化的 α 角构成了皮带秤无法克服、也无法恒定的 2FP ·sinα 这个误差项,它严重地影响着皮带秤的测量准确度及长期稳定性。 多数皮带秤的用户清楚地认识到皮带秤的诸 多影响因素,他们无法消除这些,***能做到的是通过加强维护、不断地校准来维持皮带秤的准确性。
4、高精度皮带秤改造实施
安装也是影响皮带秤精度的重要因素,通常 皮带秤安装规范及实际安装工作都将 “皮带秤的 称重辊与固定辊上表面应调整在同一平面”的要求提到极其重要的高度。国内有企业在安装时使 用激光准直仪来进行校准。但是经过如此精心调 整获得的准直度,使用时会因秤架荷重变形、焊 接应力释放变形等原因而不复存在; 更会因托辊 沾料、磨损等原因,使得皮带秤称重辊与固定辊无法长期保持在同一平面。也就是说在实际使用中 α 值不可能为零,也不为一常量。
误差项中的 FP 是皮带张力,皮带张力是皮带 输送的一个基本属性。它会随带速变化、物料的流量大小、皮带的松紧软硬而变化; 皮带的硬度 会随温度、湿度的变化而变化。显然皮带张力是无法恒定的,这样一个不确定的力和一个变化的 α 角构成了皮带秤无法克服、也无法恒定的 2FP ·sinα 这个误差项,它严重地影响着皮带秤的测量准确度及长期稳定性。 多数皮带秤的用户清楚地认识到皮带秤的诸 多影响因素,他们无法消除这些,***能做到的是通过加强维护、不断地校准来维持皮带秤的准确性。
4、高精度皮带秤改造实施
依据现行 GB /T 7721—2017 连续累计自动衡 器,以及 JJG 195—2019 连续累计自动衡器 ( 皮带 秤) 。按 0. 2 级皮带秤设计要求进行技术改造,以 期实现燃煤计量的精确核算,为电厂提供坚实准确的数据[2 - 3]。
本次改造采用太阳成集团tyc138研发的 高精度智控矩阵电子皮带秤,其具有高精度、高 稳定性、自校验、免维护、高智能化等特点,使 用精度可达到 ± 0. 2% ,性能长期稳定。
4. 1 系统组成
本次改造采用太阳成集团tyc138研发的 高精度智控矩阵电子皮带秤,其具有高精度、高 稳定性、自校验、免维护、高智能化等特点,使 用精度可达到 ± 0. 2% ,性能长期稳定。
4. 1 系统组成
高精度智控矩阵皮带秤主要由五部分组成: 8 组以上 B159 型矩阵式称重单元、测速传感器、数 字信号采集器、矩阵秤专用矩阵智能仪表 ( 拥有 8-32 组单独 AD) 、温度补偿器。矩阵桥架中的称 重传感器检测皮带上物料重量,每组矩阵秤拥有 单独的 AD,分别送入数字信号采集器; 信号采集 器将传感器模拟量转换为数字量送入智能仪表; 测速传感器直接测量运料皮带实时速度,消除了 过去监测返程皮带速度或主动滚筒速度导致的误 差,将实际的真实速度信息送入矩阵智能仪表; 温度补偿器提供实时的环境温度信号送入仪表, 对整个系统进行温度补偿。仪表把接收到的速度
信号及重量信号进行处理,经过专有的矩阵式称重积算智能数据模型处理,得到物料的累计量及 瞬时流量。称重传感器本身具有温度补偿和线性补偿的特殊功能,保持矩阵秤使用的稳定性。
4. 2 性能特点
4. 2 性能特点
eaccor—B159 系列矩阵式皮带秤,中国 0. 2 级计量器具批准证书编号 2018FC0011—32,使用中 动态累误差小于 ± 0. 2% ,***高精度可达 ± 0. 1% , 校验次稳定性周期长达 6 个月左右。配置*** 的矩阵自动校验系统,对每一路传感器单独 AD 检 测,剔除超差数据,使皮带秤保持长期高精度。
(1) 智能算法
采用智能算法实现自我判断皮带秤精度是否准确,并自我在线实时校验修复皮带秤精度。
(2) 单元数量多
矩阵式皮带秤是以特制称重单元 8 组以上串 联布置组成的皮带秤矩阵,通过对矩阵数据进行处理可以消除皮带张力的影响,大幅提高皮带秤 称重精度。
(3) 单支点平衡型称重平台
全新型平衡称重装置,结构巧妙,称重精度 高,稳定性极好,免日常维护。矩阵式称重秤体 结构,本身就是利用输送带本身的张力,来取得 自然的平衡。使得将以往所有型式皮带秤造成干扰的皮带张力变化消化于无形。物料的重量准确而完整的传递到称重平台,精确的反应物料重量的瞬时变化。这种结构可以防震、防潮、防腐及 防止物料堆积,轻量型秤体易于安装,并且可以 将称量物料的精度范围大大提高,满足不同物料工况中,不同密度物料堆取时,在流量较大变化
(1) 智能算法
采用智能算法实现自我判断皮带秤精度是否准确,并自我在线实时校验修复皮带秤精度。
(2) 单元数量多
矩阵式皮带秤是以特制称重单元 8 组以上串 联布置组成的皮带秤矩阵,通过对矩阵数据进行处理可以消除皮带张力的影响,大幅提高皮带秤 称重精度。
(3) 单支点平衡型称重平台
全新型平衡称重装置,结构巧妙,称重精度 高,稳定性极好,免日常维护。矩阵式称重秤体 结构,本身就是利用输送带本身的张力,来取得 自然的平衡。使得将以往所有型式皮带秤造成干扰的皮带张力变化消化于无形。物料的重量准确而完整的传递到称重平台,精确的反应物料重量的瞬时变化。这种结构可以防震、防潮、防腐及 防止物料堆积,轻量型秤体易于安装,并且可以 将称量物料的精度范围大大提高,满足不同物料工况中,不同密度物料堆取时,在流量较大变化
时获得稳定精度。可以满足 2% ~ 100% 流量条件 下精确计量。
(4) 应力平衡型称重传感器
单点悬浮称重平台专用高精度传感器,结构 独特且具有称重精度高、抗水平力干扰能力强等特点,精确的温度补偿,满足 OIML 称重传感器 C6 等级,远优于其他皮带秤所用 C3 等级传感器。
(5) 测速传感器
智控矩阵秤采用独特制作的高精度专用测速装置,上置式安装,与输送物料的皮带下表面接 触,确保测得速度为运载称重域的称重无缝匹配, 并且消除了皮带的任何打滑机会。 速度传感器为数字脉冲发生器,它发出一系 列脉冲,每个脉冲代表皮带行程的一个单位,脉 冲频率和皮带速度成正比。IP68 等级,防尘防水 防油耐高温,适应现场经常冲水的工况环境[4]。
(6) 实时自动互校高精度稳定系统
(4) 应力平衡型称重传感器
单点悬浮称重平台专用高精度传感器,结构 独特且具有称重精度高、抗水平力干扰能力强等特点,精确的温度补偿,满足 OIML 称重传感器 C6 等级,远优于其他皮带秤所用 C3 等级传感器。
(5) 测速传感器
智控矩阵秤采用独特制作的高精度专用测速装置,上置式安装,与输送物料的皮带下表面接 触,确保测得速度为运载称重域的称重无缝匹配, 并且消除了皮带的任何打滑机会。 速度传感器为数字脉冲发生器,它发出一系 列脉冲,每个脉冲代表皮带行程的一个单位,脉 冲频率和皮带速度成正比。IP68 等级,防尘防水 防油耐高温,适应现场经常冲水的工况环境[4]。
(6) 实时自动互校高精度稳定系统
无论矩阵秤处于空载或者带料状态,只要 智能矩阵仪表判断系统超差,即可自动进行实 时自动互校,仪表内部智能数据模型将间隔提 起矩阵秤单元电动砝码装置,比对额定砝码的 瞬时量与累积量进行自动修正,使矩阵秤系统始终保持在高精度状态稳定运行,真正达到矩阵秤免维护,免人工干涉的全自动自检高精度运 行状态[5 - 6]。
5、改造前后使用数据对比
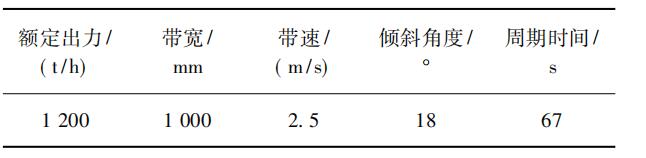
某火电厂#12A/B 皮带称出厂等级为 0. 5 级皮 带,输送机要技术参数如表 1 所示。
某火电厂#12A/B 皮带称出厂等级为 0. 5 级皮 带,输送机要技术参数如表 1 所示。
表1 皮带输送机主要技术参数
1) 改造前情况
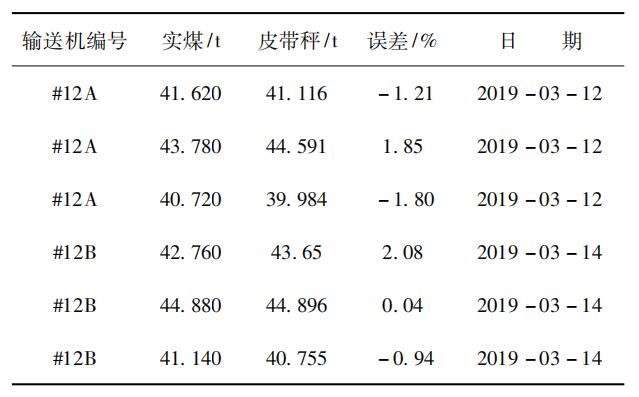
改造前,#12A/B 两台皮带秤实物检定结果如 表 2 所示,实煤的称量采用汽车衡。
表 2 改造前实物检定结果
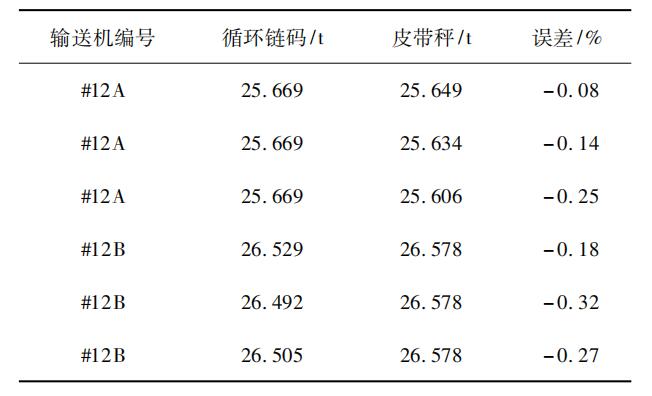
从表 2 数据可以发现,传统皮带秤的短期重 复性和稳定性较差,中长期稳定性更是难以令人 满意。改造前采用循环链码进行模拟载荷试验的数据如表 3 所示。
表 3 循环链码校验结果
从表 3 所可知,采用循环链码进行的模拟载 荷试验结果不满足 0. 5 级指标要求,只能满足 2 级 称要求。
2) 改造后情况
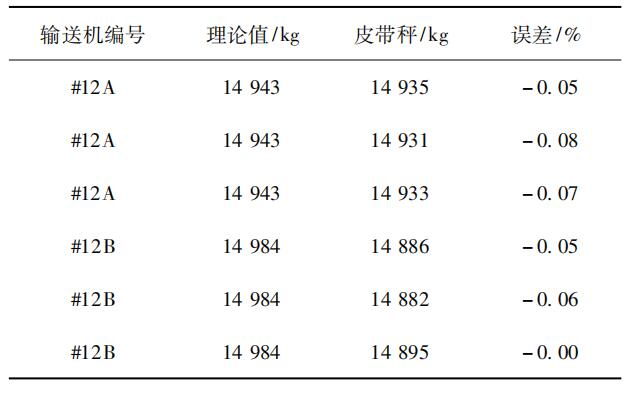
改造后,#12A/B 两台智控矩阵式带秤实物检 定结果如表 4 所示。
表 4 改造后实物检定结果
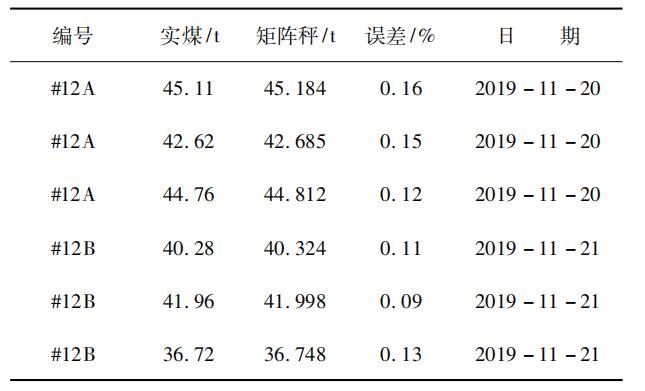
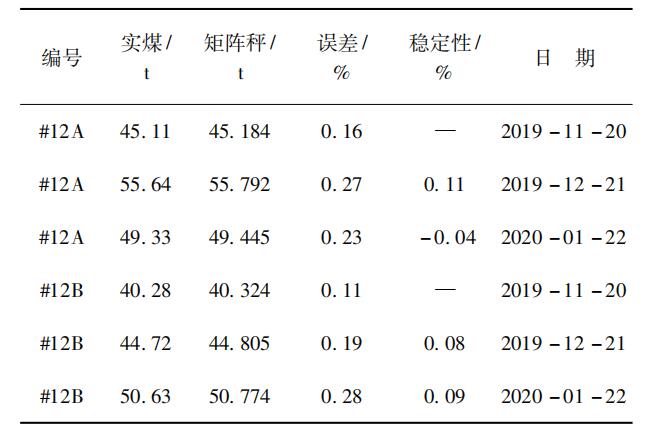
从表 4 可知,采用智控矩阵式带秤进行实物 检定结果满足 0. 2 级指标要求。 与此同时,采用间隔 1 个月的方式对#12A/B 两台智控矩阵式带秤进行为期 3 个月的稳定性考核,稳定性结果如表 5 所示。
表5 稳定性数据
改造后采用挂码进行模拟载荷试验的数据如表 6 所示。
表6 挂码校验结果
从表 6 所可知,改造后采用挂码比原先的循 环链码校验精度提高不少。 6 结论改造实践证实了高精度智控矩阵电子皮带秤 可以在现有工况环境下满足0. 2 级高精度皮带秤的使用要求,并长期保持稳定。自校验技术算法独 特,智能化程度极高,可以在输送机正常输煤运行的状态下实现自动标定并修正精度。这彻底的改变了维护传统皮带秤的方式,做到了免维护。 高精度智控矩阵皮带秤技术的广泛应用使得发电 行业,乃至钢铁、水泥、煤矿等行业输送机的计量难题得到根本改善。
参考文献:
[1] 徐信荣 . 新型电子皮带秤的研究 [D]. 西安: 西北工 业大学,2002.
[2] JJG 195—2019 连续累计自动衡器 ( 皮带秤) [S].
[3] GB 7721—2017 连续累计自动衡器 ( 皮带秤) [S].
[4] 郝鹏宇 . 新型分布式电子皮带秤的设计 [J]. 矿冶, 2016 ( 4) : 64.
[5] 曹逢. 高精度皮带秤: 208296949U [P]. 2018 -12 -28.
[6] 权 启 栋 . 一 种 电 子 皮 带 秤 自 动 挂 码 校 验 装 置: 208296969U [P]. 2018 - 12 - 28.
管系数的不确定度分量、不确定度计算方式进行系统性建模和分析,并结合试验数据对皮托管系 数校准的不确定度的影响因素进行了论述,证明 了在试验设备确定的情况下,皮托管系数校准的合成标准不确定度的数值随皮托管系数数值的减 小和线性度的提高而减小,扩展不确定度随皮托管系数的小数位数的增加而减小。
参考文献:
[1] 胡林陶,王毅 . 皮托管校准方法研究 [J]. 计测技术,2018 ( z1) : 85.
[2] JJG 518—1998 皮托管检定规程 [S].
[3] JJG 99—2006 砝码检定规程 [S].
[4] JJF 1059. 1—2012 测量不确定度评定与表示 [S].
[5] GBT 27418—2017 测量不确定度评定和表示 [S].
参考文献:
[1] 胡林陶,王毅 . 皮托管校准方法研究 [J]. 计测技术,2018 ( z1) : 85.
[2] JJG 518—1998 皮托管检定规程 [S].
[3] JJG 99—2006 砝码检定规程 [S].
[4] JJF 1059. 1—2012 测量不确定度评定与表示 [S].
[5] GBT 27418—2017 测量不确定度评定和表示 [S].

